Labeled over 100,000 frames in drone footage to improve the accuracy of object detection algorithms used for drone surveillance

30%
Boost in Object Detection Accuracy20%
Increase in Overall Operational EfficiencyExpanded
Drone Tracking Capabilities- Service Video Annotation Services Infrared & Thermal Imaging Processing Bounding Box Annotation
- Platform CVAT
- Industry Security and Surveillance
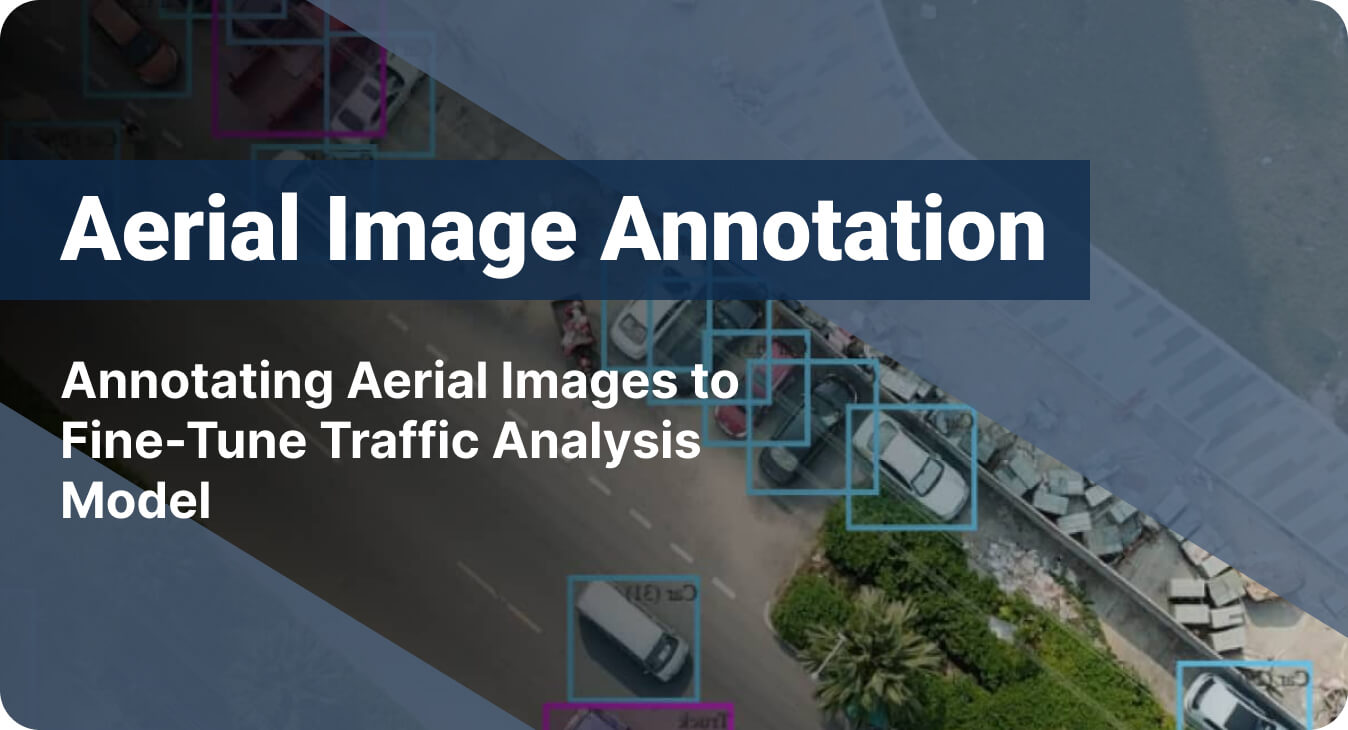
Helping a government agency improve urban traffic flow by boosting the accuracy of their AI system through aerial image labeling
35%
Increase in Model Accuracy20%
Improvement in Traffic Flow Monitoring- Service Image Annotation Bounding Box Annotation Data Classification
- Platform CVAT
- Industry Urban Planning and Development

Large-scale image annotation services for a drone-based infrastructure monitoring company developing an automated bird nest detection system on power grids.
15,000+
Images Annotated95%+
Annotation Accuracy- Service Image Annotation Services
- Platform Client’s Proprietary Annotation Platform
- Industry Wildlife Conservation / Energy